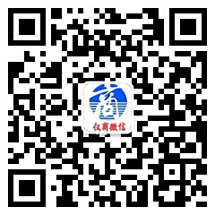




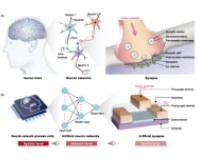
隨著自動(dòng)駕駛的發(fā)展,汽車廠商對(duì)攝像頭的選擇根據(jù)車輛的自動(dòng)化程度有所不同。在高階自動(dòng)駕駛中,汽車廠商會(huì)選擇高階自動(dòng)駕駛攝像頭,其攝像頭部分和ECU部分分置在車輛的不同位置;而其他非高階自動(dòng)駕駛中,汽車廠商出于成本考量,會(huì)選擇攝像頭部分和ECU一體化集成的智能攝像頭。
圖1:高階自動(dòng)駕駛攝像頭架構(gòu)(上)與智能攝像頭架構(gòu)(下)
智能攝像頭測(cè)試
相對(duì)于高階自動(dòng)駕駛攝像頭,智能攝像頭有其特殊的測(cè)試需求。NI基于PXI平臺(tái)為智能攝像頭推出專門測(cè)試方案,高效實(shí)現(xiàn)智能攝像頭的數(shù)據(jù)回灌和硬件在環(huán)(HIL)測(cè)試。目前,NI已能支持包括但不限于基于Mobile eyeQ系列、地平線J系列、TI TDA4VM系列等SoC的智能攝像頭測(cè)試。除此之外,NI還開(kāi)發(fā)了逆ISP方案,可用于所有Raw類型攝像頭的HIL測(cè)試。
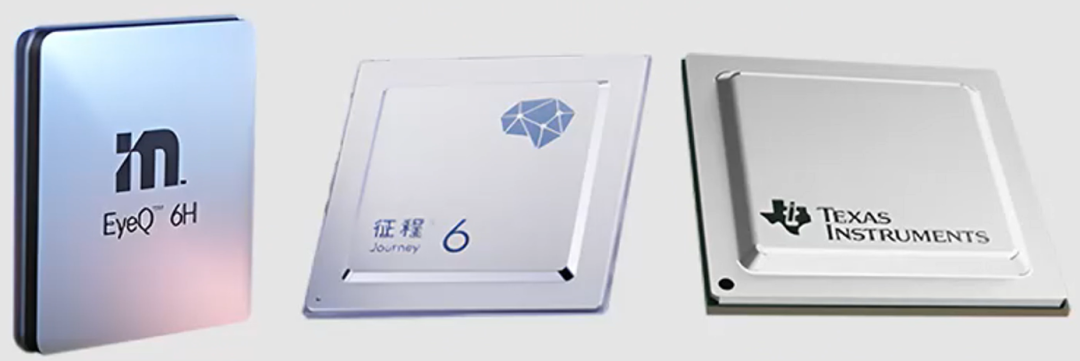
圖2:支持基于Mobile eyeQ系列、地平線J系列、TI TDA4VM系列等SoC的智能攝像頭測(cè)試
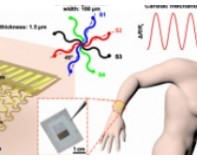
絕大多數(shù)智能攝像頭由于其一體化的架構(gòu),視頻數(shù)據(jù)無(wú)需遠(yuǎn)距離傳輸,視頻數(shù)據(jù)直接通過(guò)MIPI CSI-2接口輸入至ECU。因此,在數(shù)據(jù)回灌或HIL測(cè)試時(shí),GMSL或FPD-link鏈路的視頻數(shù)據(jù)需要被轉(zhuǎn)換為MIPI CSI-2格式,這個(gè)轉(zhuǎn)換常常由一塊轉(zhuǎn)接板來(lái)實(shí)現(xiàn)。

圖3:智能攝像頭測(cè)試架構(gòu)
NI在定制轉(zhuǎn)接板已有豐富經(jīng)驗(yàn),可實(shí)現(xiàn)視頻數(shù)據(jù)無(wú)損轉(zhuǎn)換,根據(jù)客戶需求定制,從設(shè)計(jì)到制造僅需四周工期。目前,NI已有GMSL 2.0轉(zhuǎn)MIPI CSI-2成熟產(chǎn)品,且已應(yīng)用至實(shí)際項(xiàng)目中。
圖4:GMSL 2.0-MIPI CSI-2轉(zhuǎn)接盒
逆ISP功能
根據(jù)輸出圖像類型的不同,車載攝像頭可被分為Raw類型和RGB類型。在針對(duì)攝像頭的HIL測(cè)試中,使用Raw類型攝像頭常常會(huì)遇到冗余ISP(圖像信號(hào)處理)的問(wèn)題。ISP是通過(guò)調(diào)整拜耳圖案、白平衡、色差和光學(xué)參數(shù),將Raw類型圖像轉(zhuǎn)換為RGB類型圖像的過(guò)程。
當(dāng)客戶使用RGB類型攝像頭時(shí),面對(duì)真實(shí)行車場(chǎng)景,攝像頭輸出RGB圖像至不含ISP芯片的ECU中,作為ADAS/AD算法的輸入;面對(duì)HIL測(cè)試場(chǎng)景,場(chǎng)景仿真軟件輸出RGB圖像至不含ISP芯片的ECU中,作為ADAS/AD算法的輸入。兩種場(chǎng)景下,ECU都能接收正常的RGB圖像。
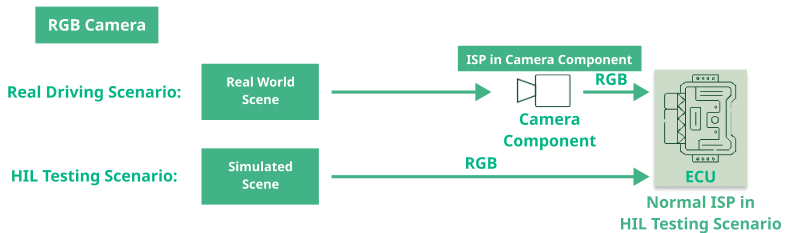
圖5:RGB類型攝像頭ISP過(guò)程
但若客戶使用Raw類型攝像頭時(shí),面對(duì)真實(shí)行車場(chǎng)景,攝像頭輸出Raw類型圖像至含ISP芯片的ECU中轉(zhuǎn)換為RGB圖像,作為ADAS/AD算法的輸入;面對(duì)HIL測(cè)試場(chǎng)景,場(chǎng)景仿真軟件生成的RGB圖像會(huì)直接輸入至含ISP芯片的ECU中,本就為RGB類型的圖像會(huì)在ECU中再次進(jìn)行一遍冗余ISP,輸出過(guò)曝的圖像作為算法輸入。
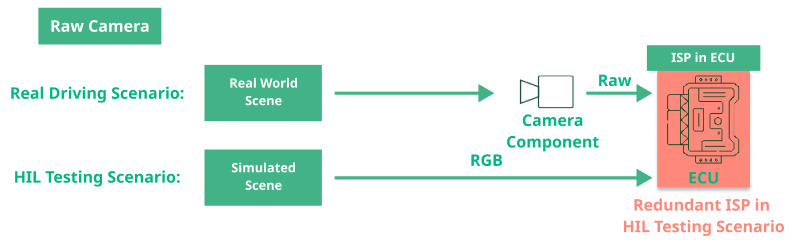
圖6:Raw類型攝像頭的冗余ISP
為了應(yīng)對(duì)冗余ISP的情況,NI訓(xùn)練了AI模型,來(lái)為場(chǎng)景仿真軟件輸出的RGB圖像做逆ISP處理。這樣,處理后生成的Raw圖像便可正常輸入至含ISP的ECU中。
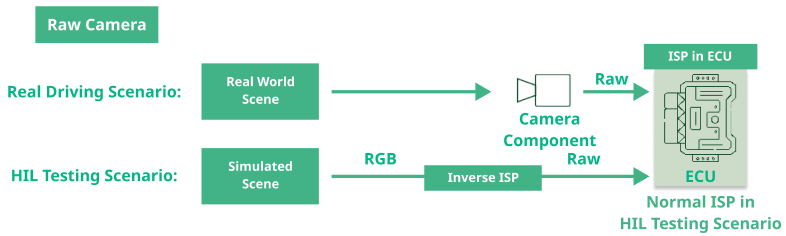
圖7:Raw類型攝像頭的正常ISP
這個(gè)AI模型是由高質(zhì)量圖像訓(xùn)練所得。部署此模型后,ECU接收的圖像和原始圖像之間的PSNR可達(dá)80dB以上。下圖展示了未部署和部署了此模型的效果。
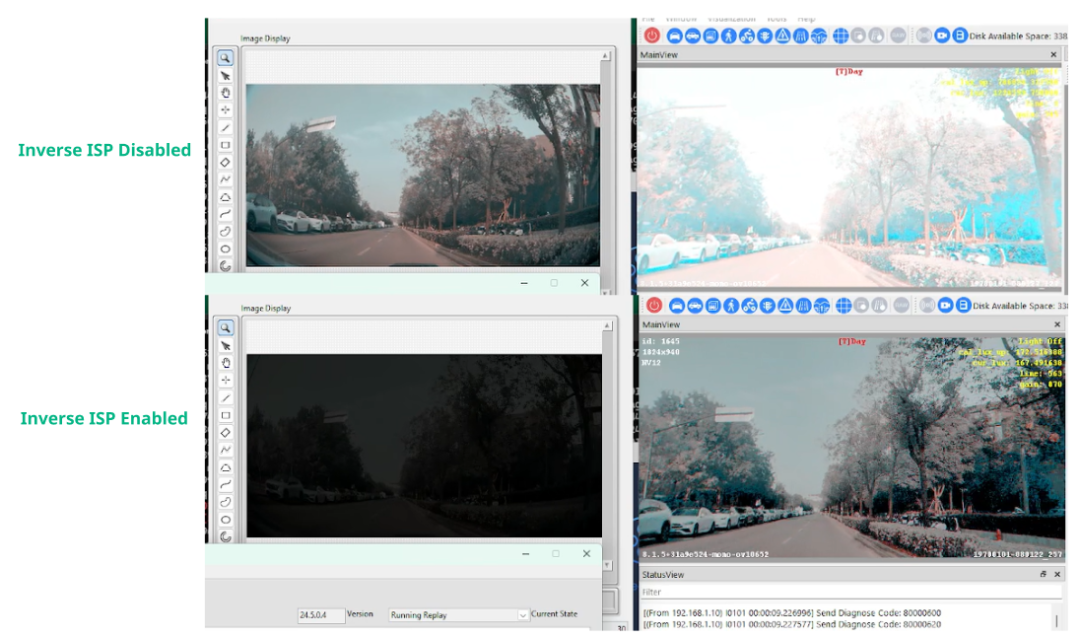
圖8:逆ISP實(shí)際效果
















合作")
站客服")


